The successive derivatives are the derivatives of a function after the second derivative. The process to calculate the successive derivatives is as follows: we have a function f, which we can derive and thus obtain the derived function f '. We can derive this derivative of f again, obtaining (f ')'.
This new function is called the second derivative; all derivatives calculated from the second are successive; These, also called higher order, have great applications, such as giving information about the plot of the graph of a function, the test of the second derivative for relative extremes and the determination of infinite series.
Article index
Using Leibniz's notation, we have that the derivative of a function "y" with respect to "x" is dy / dx. To express the second derivative of "y" using Leibniz's notation, we write as follows:

In general, we can express successive derivatives as follows with Leibniz's notation, where n represents the order of the derivative.

Other notations used are the following:

Some examples where we can see the different notations are:
Obtain all derivatives of the function f defined by:

Using the usual derivation techniques, we have that the derivative of f is:

Repeating the process we can obtain the second derivative, the third derivative and so on.
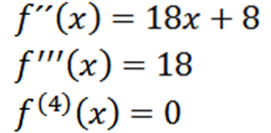
Note that the fourth derivative is zero and the derivative of zero is zero, so we have:

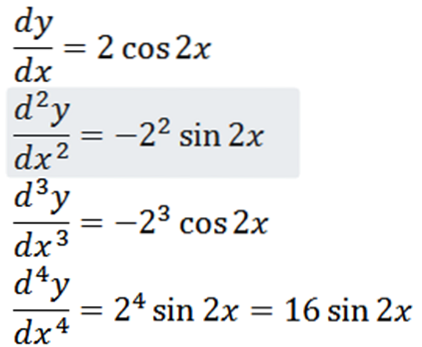
Calculate the fourth derivative of the following function:
Deriving the given function we have as a result:
One of the motivations that led to the discovery of the derivative was the search for the definition of instantaneous velocity. The formal definition is as follows:
Let y = f (t) be a function whose graph describes the trajectory of a particle at an instant t, then its velocity at an instant t is given by:

Once the velocity of a particle is obtained, we can calculate instantaneous acceleration, which is defined as follows:
The instantaneous acceleration of a particle whose path is given by y = f (t) is:

A particle moves along a line according to the position function:

Where "y" is measured in meters and "t" in seconds.
- At what instant is its velocity 0?
- At what instant is its acceleration 0?
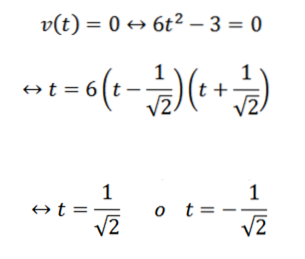
When deriving the position "y" function we have that its velocity and acceleration are given respectively by:

In order to answer the first question, it is enough to determine when the function v becomes zero; this is:
We proceed with the following question in an analogous way:

A particle moves along a line according to the following equation of motion:

Determine "t, y" and "v" when a = 0.
Knowing that speed and acceleration are given by

We proceed to derive and obtain:

Making a = 0, we have:
From where we can deduce that the value of t so that a is equal to zero is t = 1.
Then, evaluating the position function and the velocity function at t = 1, we have:

Successive derivatives can also be obtained by implicit derivation.
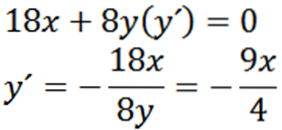
Given the following ellipse, find “y”:

Deriving implicitly with respect to x, we have:
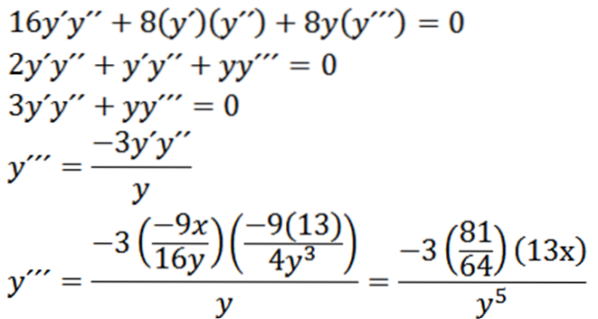
Then implicitly re-deriving with respect to x gives us:

Finally, we have:
Another use that we can give to second order derivatives is in the calculation of relative extremes of a function.
The criterion of the first derivative for local extremes tells us that, if we have a continuous function f in an interval (a, b) and there exists a c that belongs to said interval such that f 'vanishes in c (that is, that c is a critical point), one of three cases may occur:
- If f '(x)> 0 for any x belonging to (a, c) and f' (x)<0 para x perteneciente a (c,b), entonces f(c) es un máximo local.
- If f '(x) < 0 para cualquier x perteneciente a (a,c) y f'(x)>0 for x belonging to (c, b), then f (c) is a local minimum.
- If f '(x) has the same sign in (a, c) and in (c, b), it implies that f (c) is not a local extreme.
Using the criterion of the second derivative we can know if a critical number of a function is a local maximum or a minimum, without having to see what the sign of the function is in the aforementioned intervals..
The second drift criterion tells us that if f '(c) = 0 and that f "(x) is continuous in (a, b), it happens that if f" (c)> 0 then f (c) is a local minimum and if f "(c) < 0 entonces f(c) es un máximo local.
If f "(c) = 0, we cannot conclude anything.
Given the function f (x) = x4 + (4/3) x3 - 4xtwo, find the relative maxima and minima of f by applying the second derivative criterion.
First we calculate f '(x) and f "(x) and we have:
f '(x) = 4x3 + 4xtwo - 8x
f "(x) = 12xtwo + 8x - 8
Now, f '(x) = 0 if, and only if 4x (x + 2) (x - 1) = 0, and this occurs when x = 0, x = 1 or x = - 2.
To determine if the critical numbers obtained are relative extremes, it is enough to evaluate at f "and thus observe its sign.
f "(0) = - 8, so f (0) is a local maximum.
f "(1) = 12, so f (1) is a local minimum.
f "(- 2) = 24, so f (- 2) is a local minimum.
Let f be a function defined as follows:
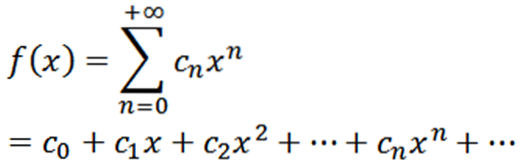
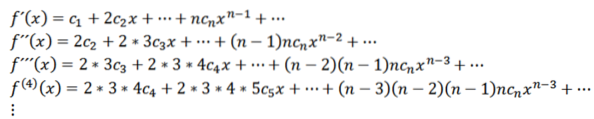
This function has a radius of convergence R> 0 and has derivatives of all orders in (-R, R). The successive derivatives of f give us:
Taking x = 0, we can obtain the values of cn based on its derivatives as follows:
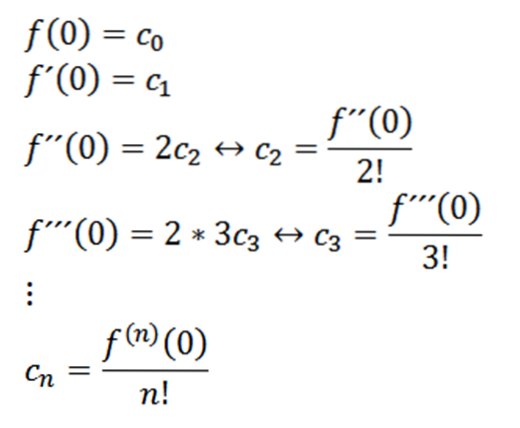
If we take n = 0 as the function f (that is, f ^ 0 = f), then we can rewrite the function as follows:

Now let's consider the function as a series of powers at x = a:
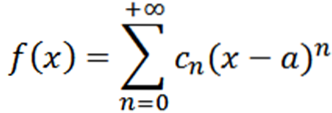
If we carry out an analysis analogous to the previous one, we would have that we can write the function f as:

These series are known as Taylor series from f to a. When a = 0 we have the particular case that is called the Maclaurin series. This type of series is of great mathematical importance especially in numerical analysis, since thanks to these we can define functions in computers such as ex , sin (x) and cos (x).
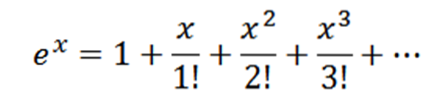
Get the Maclaurin series for ex.
Note that if f (x) = ex, then f(n)(x) = ex and f(n)(0) = 1, so your Maclaurin series is:



Yet No Comments