
An extended body is stated to be in rotational balance when the sum of the torques acting on it is zero. This does not mean that the object is necessarily at rest, but rather that there is no net tendency to change its state of motion for another..
An object that moves with constant velocity does so along a straight line and we can consider it in rotational equilibrium. Now, objects rotate because there are forces acting on them in such a way that a rotation results. The ability of a force to produce rotation, called torque or torca, depends not only on the intensity of the force, but also on where it is applied.

We recognize this immediately when a closed door is to be opened: force is never applied near the hinges, but away from them, that is why the handle is placed as far as possible, on the opposite side of the door.
The door's axis of rotation passes through the hinges. Insisting on pushing it very close to the hinges, it takes a great effort to make the door move even a little..
In the literature, torque is found under different names: torque, torsion, moment of a force, and torque. They are all synonymous.
So, we need to know the torques acting on an object to establish the rotational equilibrium condition.
Article index
The rotational equilibrium condition is:
The sum of all the moments or torques that act on a body, calculated with respect to any axis, must be zero.
The object in question must be stretched, since particles, by definition, only have translational equilibrium.
There may be forces applied to the body and still exist rotational equilibrium, as long as the forces do not make it rotate.
There can also be movement, even accelerated, but always along a straight line, since not all forces cause the appearance of torques. These appear when the forces do not all act along the same line of action..
Torque is denoted by the Greek letter τ, on bold font because it is a vector and thus we distinguish it from its magnitude or module, which is a scalar. It depends on the applied force F, vector r that is directed from the axis of rotation O to the point of application of the force and finally, from the angle between these two vectors.
The vector product establishes the appropriate relationship between these quantities:
τ = r x F
And the torque module, denoted without bold, is:
τ = r⋅F⋅sen θ
Where θ is the angle between r Y F. The units of torque are simply N⋅m in the International System.
In the figure there is a spanner with which it is intended to turn a nut counterclockwise (counter clockwise). For this it is tested with two forces FTO Y FB.
FTO is closer to O and has a vector rTO or shorter lever arm, therefore it does not produce as much torque as the force FB, which has equal magnitude, but has a vector rB larger.
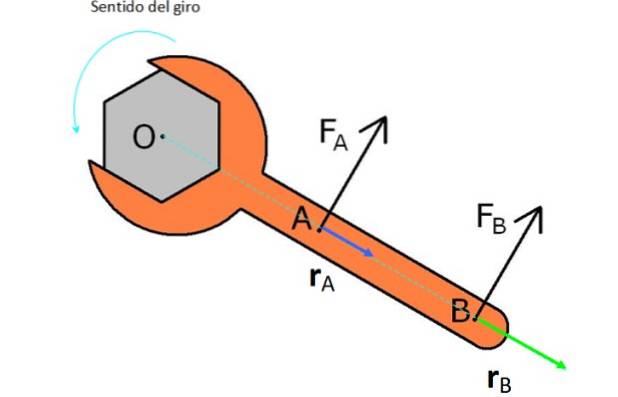
Note that if you want to rotate the nut clockwise, you must apply the forces in the opposite direction as shown in the figure.
As the torque results from the cross product between the force and position vectors, and these are in the plane of the wrench, the torque must be a vector perpendicular to said plane, that is, directed towards the reader or into the page.
By convention, torque is positive if it rotates counterclockwise, and negative if it rotates clockwise..
The direction and sense of the resulting torque are easily determined by the right hand rule shown below:
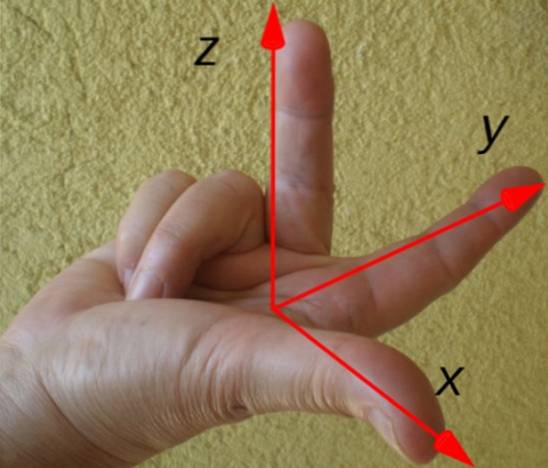
The index finger points according to the position vector r, middle finger according to strength F and the thumb points the direction and sense of torque τ. In this example, the torque is directed along the x axis, according to the coordinate axes drawing.
If torques act on a body τ1, τtwo, τ3… τi, the net or resultant torque τn is the vector sum of all of them:
τn = τ1+ τtwo + τ3 +... τi
With summation notation it remains:
τn = ∑ τi
The equilibrium condition is expressed mathematically as follows:
τn = 0
O well:
∑ τi = 0
Where the torque τ, with respect to a certain axis O, it is calculated by:
τ = r x F
And whose magnitude is:
τ = r⋅F⋅sen θ
-In humans and animals, weight is a force that can cause torque and spin and fall.
People generally maintain a posture such that when walking, they keep them in rotational balance, unless they practice sports activities, such as gymnastics, skating or sports in general..
-Two boys who managed to stay horizontal in the rocker or up and down are in rotational equilibrium.
-When the balance pans are balanced, the system is in rotational equilibrium.
-Signs and traffic lights hanging on streets and avenues are also in rotational equilibrium. If the cables that hold them break, this balance is lost and the sign hangs or falls..
-Suspension bridges like the Golden Gate in San Francisco and the bridge in Figure 1.
The support bar shown in the figure is very light. The force exerted by the support is F and at the extreme right force is applied TO.
It is requested to calculate the magnitudes of these forces considering that the system is in translational and rotational equilibrium.

As the system does not move, the summation of forces is canceled. They are all vertical and can be worked with the magnitudes. The positive direction is upwards and the negative direction is downwards, therefore:
F - 80 - A = 0
Now the rotational equilibrium condition is applied, for which we must choose an arbitrary axis of rotation. In this case, it is chosen at the extreme right, so that the vector rTO is null, in this way the torque exerted by TO, but only those of F and the force of the left.
The torque produced by F is, according to the right hand rule and the coordinate system shown:
τF = rF x F = 0.9 F (-k) N.m
It is directed towards the inside of the screen and has a negative sign. While the torque produced by the 80 N force is:
τ = 80 x 1.20 (k) N⋅m = 96 (k) N⋅m
This torque is directed away from the screen and is assigned a positive sign. How there is rotational equilibrium:
96 - 0.9⋅F = 0
The magnitude of F it is:
F = (96 / 0.9) N = 106.7 N
And since the system is in translational equilibrium, the summation of the forces cancels out. This allows us to solve for the magnitude of TO:
F - A - 80 N = 0
Therefore:
A = 106.7 - 80 N = 26.7 N.

Yet No Comments