The vector algebra is a branch of mathematics in charge of studying systems of linear equations, vectors, matrices, vector spaces and their linear transformations. It is related to areas such as engineering, resolution of differential equations, functional analysis, operations research, computer graphics, among others..
Another area that linear algebra has adopted is physics, since through this it has been possible to develop the study of physical phenomena, describing them through the use of vectors. This has made possible a better understanding of the universe.
Article index
Vector algebra originated from the study of quaternions (extension of real numbers) 1, i, j, and k, as well as from the Cartesian geometry promoted by Gibbs and Heaviside, who realized that vectors would serve as an instrument for represent various physical phenomena.
Vector algebra is studied through three fundamentals:
Vectors are represented by lines that have an orientation, and operations such as addition, subtraction and multiplication by real numbers are defined through geometric methods..
The description of vectors and their operations is done with numbers, called components. This type of description is the result of a geometric representation because a coordinate system is used.
A description of the vectors is made, regardless of the coordinate system or any type of geometric representation.
The study of figures in space is done through their representation in a reference system, which can be in one or more dimensions. Among the main systems are:
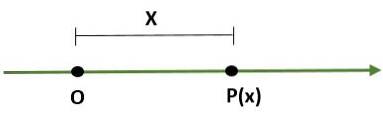
- One-dimensional system, which is a line where a point (O) represents the origin and another point (P) determines the scale (length) and its direction:
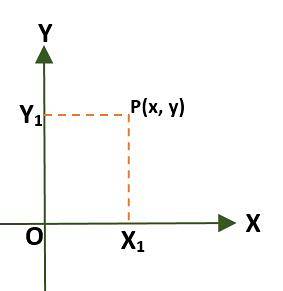
- Rectangular coordinate system (two-dimensional), which is made up of two perpendicular lines called the x-axis and the y-axis, which pass through a point (O) origin; in this way the plane is divided into four regions called quadrants. In this case a point (P) in the plane is given by the distances that exist between the axes and P.
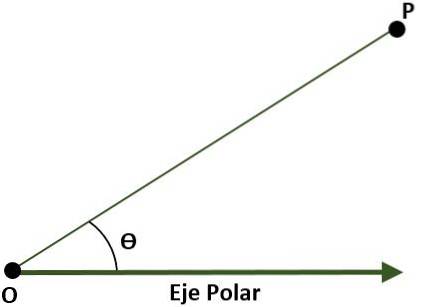
- Polar coordinate system (two-dimensional). In this case the system is composed of a point O (origin) which is called the pole and a ray with origin in O called the polar axis. In this case the point P of the plane, with reference to the pole and the polar axis, is given by the angle (Ɵ), which is formed by the distance between the origin and the point P.
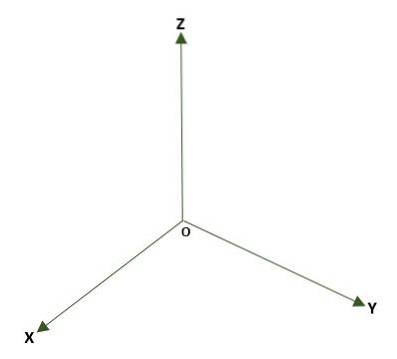
- Rectangular three-dimensional system, formed by three perpendicular lines (x, y, z) whose origin is a point O in space. Three coordinate planes are formed: xy, xz and yz; the space will be divided into eight regions called octants. The reference of a point P in space is given by the distances that exist between the planes and P.
A magnitude is a physical quantity that can be counted or measured through a numerical value, as in the case of some physical phenomena; however, it is often necessary to be able to describe these phenomena with factors other than numerical. That is why the magnitudes are classified into two types:
They are those quantities that are defined and represented numerically; that is, by a module together with a unit of measure. For example:
a) Time: 5 seconds.
b) Mass: 10 kg.
c) Volume: 40 ml.
d) Temperature: 40 ºC.
They are those quantities that are defined and represented by a module together with a unit, as well as by a sense and direction. For example:
a) Velocity: (5ȋ - 3ĵ) m / s.
b) Acceleration: 13 m / stwo; S 45º E.
c) Force: 280 N, 120º.
d) Weight: -40 ĵ kg-f.
Vector quantities are represented graphically by vectors.
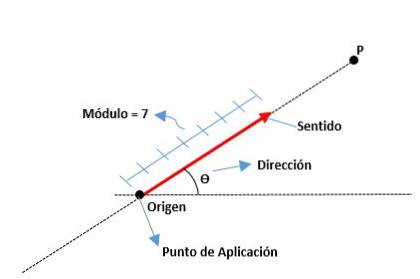
Vectors are graphical representations of a vector quantity; that is, they are line segments in which their final end is the tip of an arrow.
These are determined by its module or segment length, its direction, which is indicated by the tip of its arrow, and its direction according to the line to which it belongs. The origin of a vector is also known as the point of application.
The elements of a vector are as follows:
It is the distance from the origin to the end of a vector, represented by a real number along with a unit. For example:
| OM | = | A | = A = 6 cm
It is the measure of the angle that exists between the x axis (from the positive) and the vector, as well as the cardinal points (north, south, east and west).
It is given by the arrowhead located at the end of the vector, indicating where it is going.
Generally, vectors are classified as:
It is one whose point of application (origin) is fixed; that is, it remains linked to a point in space, so it cannot move in this.
It can move freely in space because its origin moves to any point without changing its module, direction or direction..
It is one that can transfer its origin along its line of action without changing its module, direction or direction..
Among the main properties of vectors are the following:
They are those free vectors that have the same module, direction (or they are parallel) and sense as a sliding vector or a fixed vector.
It occurs when two vectors have the same direction (or are parallel), the same sense, and despite having different modules and points of application, they cause the same effects.
These have the same module, direction and sense, even though their starting points are different, which allows a parallel vector to translate itself without affecting it..
They are those that have the same module and direction, but their sense is opposite.
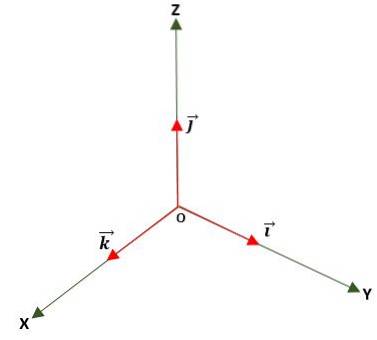
It is one in which the module is equal to the unit (1). This is obtained by dividing the vector by its module and is used to determine the direction and sense of a vector, either in the plane or in space, using the base or normalized unit vectors, which are:
It is the one whose modulus is equal to 0; that is, its point of origin and end coincide at the same point.
The components of a vector are those values of the vector's projections on the axes of the reference system; Depending on the decomposition of the vector, which can be on two or three-dimensional axes, two or three components will be obtained, respectively.
The components of a vector are real numbers, which can be positive, negative, or even zero (0).
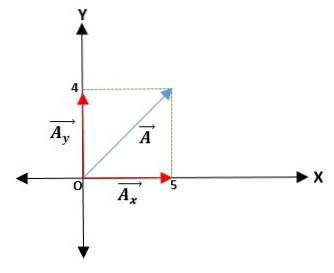
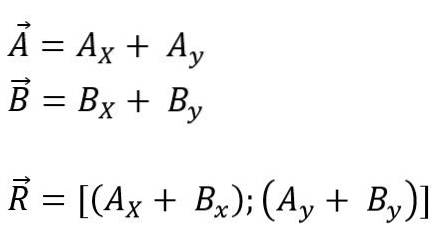
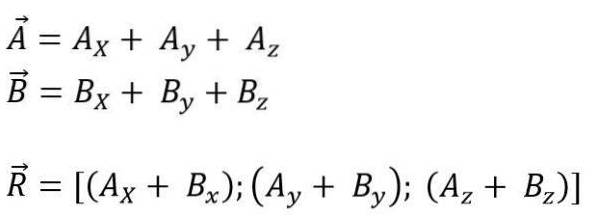
Thus, if we have a vector Ā, with origin in a rectangular coordinate system in the xy plane (two-dimensional), the projection on the x-axis is Āx and the projection on the y-axis is Āy. Thus, the vector will be expressed as the sum of its component vectors.
We have a vector Ā that starts from the origin and the coordinates of its ends are given. Thus, the vector Ā = (Āx; TOY) = (4; 5) cm.
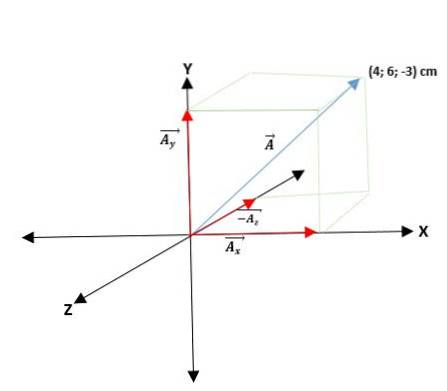
If the vector Ā acts at the origin of a three-dimensional triangular coordinate system (in space) x, y, z, to another point (P), the projections on its axes will be Āx, Āy and Āz; thus, the vector will be expressed as the sum of its three component vectors.
We have a vector Ā that starts from the origin and the coordinates of its ends are given. Thus, the vector Ā = (Ax; TOY; TOz) = (4; 6; -3) cm.
Vectors that have their rectangular coordinates can be expressed in terms of their base vectors. For that, you only have to multiply each coordinate by its respective unit vector, in such a way that for the plane and the space they will be the following:
For the plane: Ā = Axi + AYj.
For the space: Ā = Axi + AYj + Azk.
There are many quantities that have a module, sense, and direction, such as acceleration, speed, displacement, force, among others..
These are applied in various areas of science, and to apply them it is necessary in some cases to perform operations such as addition, subtraction, multiplication and division of vectors and scalars..
The addition and subtraction of vectors is considered a single algebraic operation because the subtraction can be written as a sum; for example, the subtraction of the vectors Ā and Ē can be expressed as:
Ā - Ē = Ā + (-Ē)
There are different methods to perform the addition and subtraction of vectors: they can be graphical or analytical.
Used when a vector has a module, sense and direction. For this, lines are drawn that form a figure that later help to determine the result. Among the best known are the following:
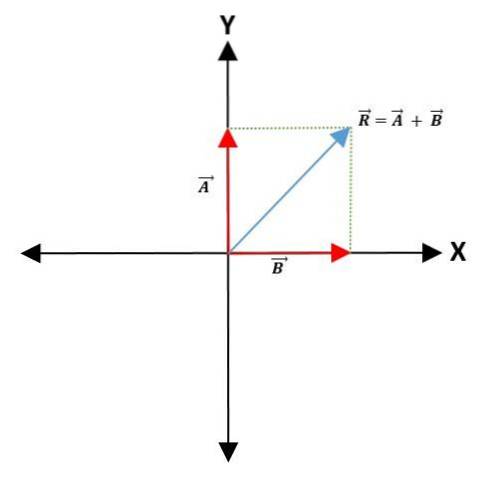
To make the addition or subtraction of two vectors, a common point is chosen on the coordinate axis -which will represent the point of origin of the vectors-, keeping its module, direction and direction..
Lines are then drawn parallel to the vectors to form a parallelogram. The resulting vector is the diagonal that goes from the point of origin of both vectors to the vertex of the parallelogram:
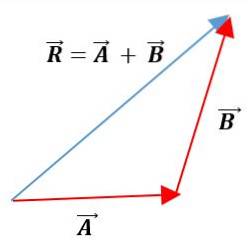
In this method the vectors are placed one after the other, keeping their modules, directions and directions. The resulting vector will be the union of the origin of the first vector with the end of the second vector:
Two or more vectors can be added or subtracted through a geometric or vector method:
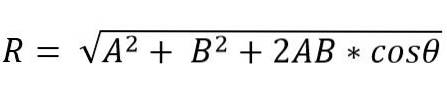
When two vectors form a triangle or parallelogram, the modulus and direction of the resulting vector can be determined using the laws of sine and cosine. Thus, the module of the resulting vector, applying the cosine law and by the triangle method, is given by:
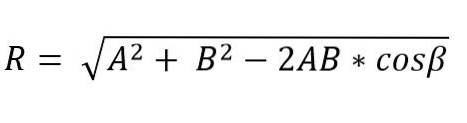
In this formula β is the angle opposite the side R, and this is equal to 180º - Ɵ.
Instead, by the parallelogram method, the modulus of the resulting vector is:
The direction of the resultant vector is given by the angle (α), which forms the resultant with one of the vectors.
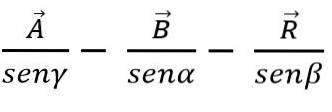
By the law of sine, the addition or subtraction of vectors can also be done by the triangle or parallelogram method, knowing that in every triangle the sides are proportional to the sines of the apposed angles:
This can be done in two ways: depending on its rectangular coordinates or its base vectors.
It can be done by translating the vectors to be added or subtracted towards the origin of coordinates, and then decomposing into their rectangular components all the projections in each of the axes for the plane (x, y) or space (x, and Z); finally, its components are added algebraically. So for the plane it is:
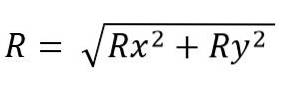
The modulus of the resulting vector is:
While for space it is:
The modulus of the resulting vector is:

When vector sums are performed, several properties are applied, which are:
- Associative property: the resultant does not change when adding two vectors first, and then adding a third vector.
- Commutative property: the order of the vectors does not alter the resultant.
- Vector distributive property: if a scalar is multiplied by the sum of two vectors, it is equal to the multiplication of the scalar by each vector.
- Scalar distributive property: if a vector is multiplied by the sum of two scalars, it is equal to the multiplication of the vector for each scalar.
The multiplication or product of vectors could be done as addition or subtraction, but doing it that way loses the physical meaning and is almost never found in applications. Therefore, generally the most used types of products are the scalar and vector product.
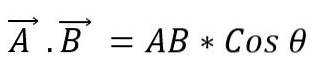
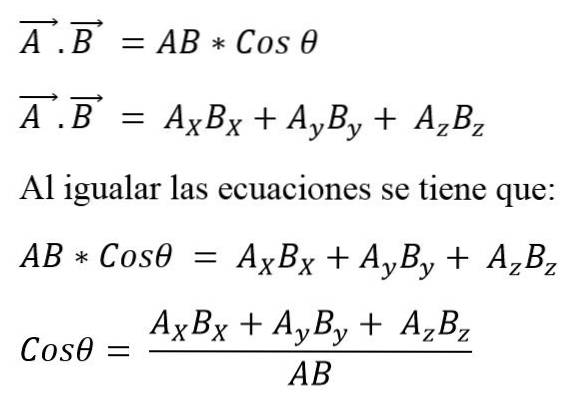
It is also known as the dot product of two vectors. When the modules of two vectors are multiplied by the cosine of the smallest angle formed between them, a scalar is obtained. To express a scalar product between two vectors, a point is placed between them, and this can be defined as:
The value of the angle that exists between the two vectors will depend on whether they are parallel or perpendicular; thus, you have to:
- If the vectors are parallel and have the same sense, cosine 0º = 1.
- If the vectors are parallel and have opposite directions, cosine 180º = -1.
- If the vectors are perpendicular, cosine 90º = 0.
That angle can also be calculated knowing that:
The dot product has the following properties:
- Commutative property: the order of the vectors does not alter the scalar.
-Distributive property: if a scalar is multiplied by the sum of two vectors, it is equal to the multiplication of the scalar by each vector.
Vector multiplication, or cross product of two vectors A and B, will result in a new vector C and is expressed using a cross between the vectors:
The new vector will have its own characteristics. That way:
- The direction: this new vector will be perpendicular to the plane, which is determined by the original vectors.
- The direction: this is determined with the right hand rule, where vector A is rotated towards B, indicating the direction of rotation with the fingers, and the direction of the vector is marked with the thumb.
- The module: is determined by the multiplication of the modules of the vectors AxB, by the sine of the smallest angle that exists between these vectors. It is expressed:
The value of the angle that exists between the two vectors will depend on whether they are parallel or perpendicular. So, it is possible to state the following:
- If the vectors are parallel and have the same sense, sine 0º = 0.
- If the vectors are parallel and have opposite directions, sine 180º = 0.
- If the vectors are perpendicular, sine 90º = 1.
When a vector product is expressed as a function of its base vectors, we have:

The dot product has the following properties:
- It is not commutative: the order of the vectors alters the scalar.
- Distributive property: if a scalar is multiplied by the sum of two vectors, it is equal to the multiplication of the scalar by each vector.



Yet No Comments