
Varignon's theorem, in Mechanics, states that the sum of the moments produced by a system of concurrent forces with respect to a certain point is equal to the moment of the resultant force with respect to the same point.
For this reason this theorem is also known as the beginning of moments.
Although the first to enunciate it was the Dutch Simon Stevin (1548-1620), the creator of the hydrostatic paradox, the French mathematician Pierre Varignon (1654-1722) was the one who later gave it its final form.
An example of how Varignon's theorem works in Mechanics is the following: suppose that a simple system of two coplanar and concurrent forces acts on a point F1 Y Ftwo, (denoted in bold because of their vector character). These forces give rise to a net or resultant force, called FR.
Each force exerts a torque or moment about a point O, which is calculated by the vector product between the position vector rOP and the strengh F, where rOP is directed from O to the point of concurrency P:
MO1 = rOP × F1
MO2 = rOP × Ftwo
Given the FR = F1 + Ftwo, then:
MOR = rOP × F1 + rOP × Ftwo = MO1 + MO2
But how rOP is a common factor, then, applying distributive property to the cross product:
MOR = rOP × (F1 + Ftwo) = rOP × FR
Therefore, the sum of the moments or torques of each force with respect to point O is equivalent to the moment of the resultant force with respect to the same point.
Let be a system of N concurrent forces, formed by F1, Ftwo, F3... FN, whose lines of action intersect at point P (see figure 1), the moment of this force system MOR, with respect to a point O is given by:
MOR = rOP × F1 + rOP × Ftwo + rOP × F3 +... rOP × FN = rOP × (F1 + Ftwo + F3 +... FN)
To prove the theorem, use is made of the distributive property of the vector product between vectors.
Be the forces F1, Ftwo, F3... FN applied to points A1, TOtwo, TO3… TON and concurrent at point P. The resulting moment of this system, with respect to a point O, called MOR, is the sum of the moments of each force, with respect to said point:
MOR = ∑ rOAi × Fi
Where the sum goes from i = 1 to i = N, since there are N forces. As we are dealing with concurrent forces and since the vector product between parallel vectors is zero, it happens that:
rPAi × Fi = 0
With the null vector denoted as 0.
The moment of one of the forces with respect to O, for example that of the force Fi applied in Ai, it is written like this:
MI heard = rOAi × Fi
The position vector rOAi can be expressed as the sum of two position vectors:
rOAi = rOP + rPAi
In this way, the moment about O of the force Fi it is:
MI heard = (rOP + rPAi) × Fi = (rOP × Fi) + (rPAi × Fi)
But the last term is null, as explained above, because rPAi is on the line of action of Fi, Thus:
MI heard = rOP × Fi
Knowing that the moment of the system with respect to point O is the sum of all the individual moments of each force with respect to said point, then:
MOR = ∑ MI heard = ∑ rOP × Fi
What rOP is constant comes out of the sum:
MOR = rOP × (∑ Fi)
But ∑ Fi is simply the net force or resultant force FR, therefore it is immediately concluded that:
MOR = rOP × FR
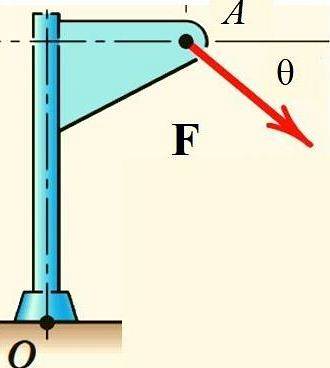
Varignon's theorem facilitates the calculation of the moment of force F With respect to point O in the structure shown in the figure, if the force is decomposed into its rectangular components and the moment of each of them is calculated:
When the resultant force of a system is known, Varignon's theorem can be applied to replace the sum of each of the moments produced by the forces that compose it by the moment of the resultant.
If the system consists of forces on the same plane and the point with respect to which the moment is to be calculated belongs to that plane, the resulting moment is perpendicular.
For example, if all the forces are in the xy plane, the moment is directed in the z axis and it only remains to find its magnitude and its sense, such is the case of the example described above..
In this case, Varignon's theorem allows us to calculate the resulting moment of the system through the summation. It is very useful in the case of a three-dimensional force system, for which the direction of the resulting moment is not known a priori.
To solve these exercises, it is convenient to decompose forces and position vectors into their rectangular components, and from the sum of the moments, determine the components of the net moment.
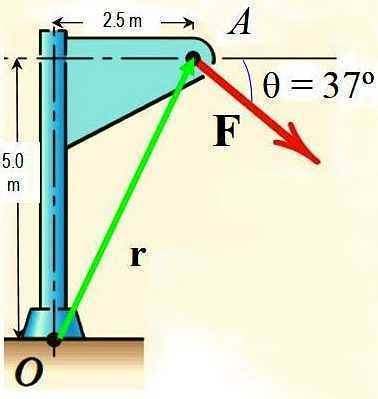
Using Varignon's theorem, calculate the moment of the force F around the point O shown in the figure if the magnitude of F is 725 N.
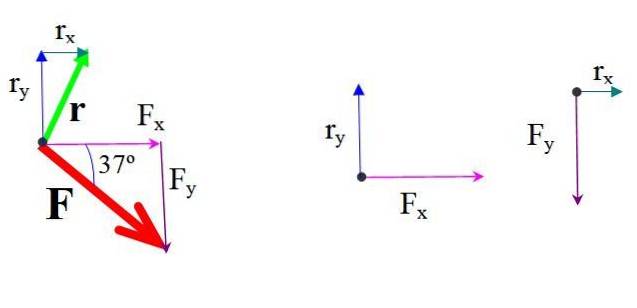
To apply Varignon's theorem, the force is decomposed F in two components, whose respective moments around O are calculated and added to obtain the resulting moment.
Fx = 725 N ∙ cos 37 º = 579.0 N
FY = - 725 N N ∙ sin 37 º = −436.3 N
Similarly, the position vector r directed from O to A has the components:
rx = 2.5 m
rY = 5.0 m
The moment of each component of the force about O is found by multiplying the force and the perpendicular distance.
Both forces tend to rotate the structure in the same direction, which in this case is clockwise, to which a positive sign is arbitrarily assigned:
MOx = Fx∙ rY ∙ sin 90º = 579.0 N ∙ 5.0 m = 2895 N ∙ m
MOy = FY∙ rx ∙ sin (−90º) = −436.3 N ∙ 2.5 m ∙ (−1) = 1090.8 N ∙ m
The resulting moment about O is:
MOR = MOx + MOy = 3985.8 N ∙ m perpendicular to the plane and clockwise.

Yet No Comments