The collinear vectors they are one of the three types of existing vectors. These are those vectors that are in the same direction or line of action. This means the following: two or more vectors will be collinear if they are arranged in lines that are parallel to each other.
A vector is defined as a quantity applied to a body and is characterized by having a direction, a sense and a scale. Vectors can be found in the plane or in space and can be of different types: collinear vectors, concurrent vectors, and parallel vectors.
Article index
Vectors are collinear if the line of action of one is exactly the same line of action of all the other vectors, regardless of the size and direction of each of the vectors.
Vectors are used as representations in different areas such as mathematics, physics, algebra and also in geometry, where vectors are collinear only when their direction is the same, regardless of whether their sense is not..
- Two or more vectors are collinear if the relationship between the coordinates is equal.
We have the vectors m = m_x; m_y and n = n_x; n_y. These are collinear if:
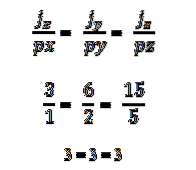
- Two or more vectors are collinear if the vector product or multiplication is equal to zero (0). This is because, in the coordinate system, each vector is characterized by its respective coordinates, and if these are proportional to each other, the vectors will be collinear. This is expressed in the following way:
We have the vectors a = (10, 5) and b = (6, 3). To determine if they are collinear, the determinant theory is applied, which establishes the equality of the cross products. Thus, you have to:
Collinear vectors are graphically represented using the direction and sense of these - taking into account that they must pass through the point of application - and the module, which is a certain scale or length..
The system of collinear vectors is formed when two or more vectors act on an object or body, representing a force and acting in the same direction..
For example, if two collinear forces are applied on a body, the resultant of these will only depend on the direction in which they act. There are three cases, which are:
The resultant of two collinear vectors is equal to the sum of these:
R = ∑ F = F1 + Ftwo.
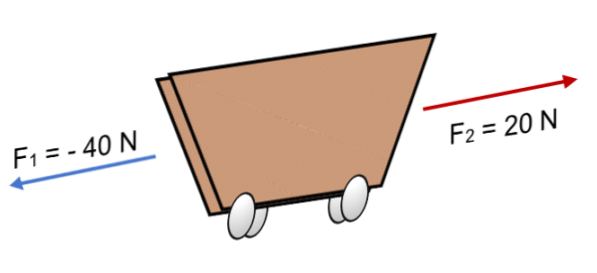
If two forces F act on a cart1 = 40 N and Ftwo = 20 N in the opposite direction (as shown in the image), the result is:
R = ∑ F = (- 40 N) + 20N.
R = - 20 N.
The magnitude of the resultant force will be equal to the sum of the collinear vectors:
R = ∑ F = F1 + Ftwo.
If two forces F act on a cart1 = 35 N and Ftwo = 55 N in the same direction (as shown in the image), the result is:
R = ∑ F = 35 N + 55N.
R = 90 N.
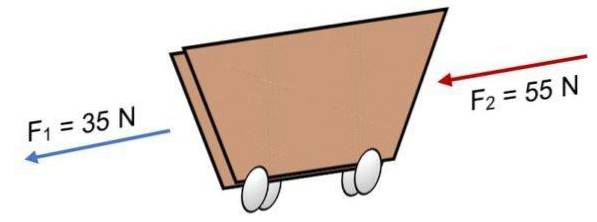
The positive resultant indicates that the collinear vectors act to the left.
The resultant of the two collinear vectors will be equal to the sum of the collinear vectors:
R = ∑ F = F1 + Ftwo.
As the forces have the same magnitude but in the opposite direction -that is, one will be positive and the other negative-, when the two forces are added, the resultant will be equal to zero..
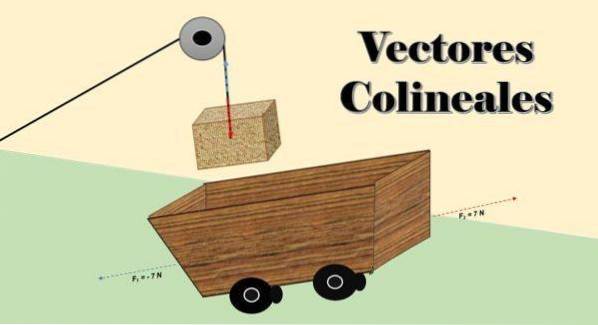
If two forces F act on a cart1 = -7 N and Ftwo = 7 N, which have the same magnitude but in the opposite direction (as shown in the image), the result is:
R = ∑ F = (-7 N) + 7N.
R = 0.
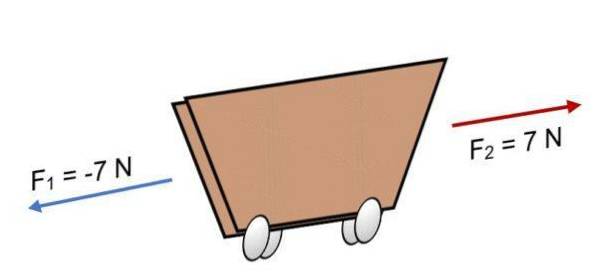
Since the resultant is equal to 0, it means that the vectors balance each other and therefore the body is in equilibrium or at rest (it will not move).
Collinear vectors are characterized by having the same direction in the same line, or because they are parallel to a line; that is, they are director vectors of parallel lines.
Concurrent vectors are defined because they are in different lines of action that intersect at a single point..
In other words, they have the same point of origin or arrival - regardless of their module, direction or direction - forming an angle between them..
Concurrent vector systems are solved by mathematical or graphical methods, which are the parallelogram of forces method and the polygon of forces method. Through these the value of a resulting vector will be determined, which indicates the direction in which a body will move.
Basically, the main difference between collinear and concurrent vectors is the line of action in which they act: the collinear ones act in the same line, while the concurrent in different.
That is, the collinear vectors act in a single plane, "X" or "Y"; and the concurrent ones act in both planes, starting from the same point.
Collinear vectors do not meet at a point, as concurrent vectors do, because they are parallel to each other.
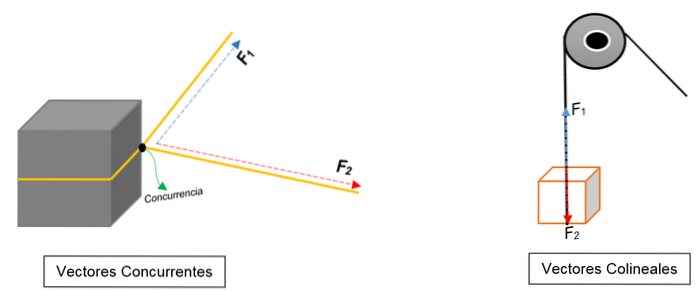
In the left image you can see a block. It is tied with a rope and the knot divides it in two; when being pulled towards different orientations and with different forces, the block will move towards the same direction.
Two vectors that concur at a point (the block) are being represented, regardless of their module, direction or direction.
Instead, in the right image there is a pulley lifting a box. The rope represents the line of action; when it is pulled, two forces (vectors) act on it: a tension force (when the block is raised) and another force, which exerts the weight of the block. Both have the same direction but in opposite directions; they do not concur at one point.


Yet No Comments