
The vector They are mathematical entities that have a -positive- magnitude, generally accompanied by a unit of measurement, as well as direction and sense. Such characteristics are very appropriate to describe physical quantities such as speed, force, acceleration and many more.
With vectors it is possible to perform operations such as addition, subtraction and products. Division is not defined for vectors and as for the product, there are three classes that we will describe later: dot product or point, vector product or cross and product of a scalar by a vector.
To fully describe a vector, all its characteristics must be indicated. The magnitude or module is a numerical value accompanied by a unit, while the direction and direction are established with the help of a coordinate system.
Let's look at an example: let's say an airplane flies from one city to another at a rate of 850 km / h in a NE direction. Here we have a fully specified vector, since the magnitude is available: 850 km / h, while the direction and sense are NE.
Vectors are usually represented graphically by oriented line segments, whose length is proportional to the magnitude.
While to specify the direction and the sense a reference line is required, which is usually the horizontal axis, although north can also be taken as a reference, such is the case of the speed of the plane:
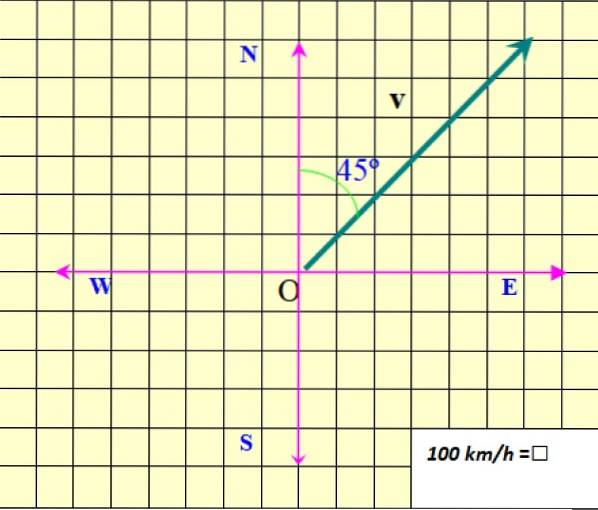
The figure shows the velocity vector of the plane, which is denoted as v on bold, to distinguish it from a scalar quantity, which only requires a numerical value and some unit to be specified.
Article index
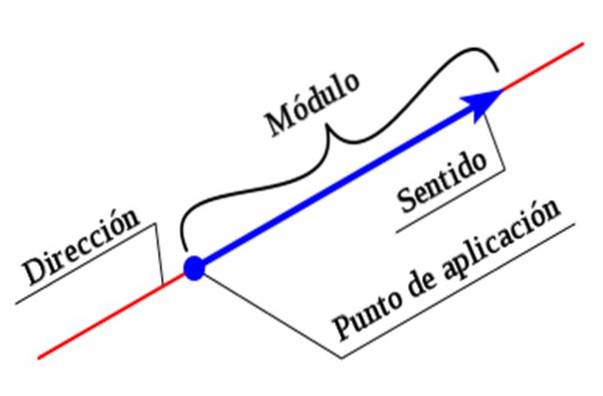
As we have said, the elements of the vector are:
-Magnitude or modulus, sometimes also called absolute value or norm of the vector.
-Direction
-Sense
In the example in figure 2, the module v It is 850 km / h. The modulus is denoted as v without bold, or as |v|, where the bars represent the absolute value.
The address of v is specified with respect to the North. In this case it is 45º North of East (45º NE). Finally the tip of the arrow informs about the direction of v.
In this example, the origin of the vector has been drawn coinciding with the origin O of the coordinate system, this is known as bound vector. On the other hand, if the origin of the vector does not coincide with that of the reference system, it is said to be a free vector.
It should be noted that to fully specify the vector, these three elements must be noted, otherwise the description of the vector would be incomplete.
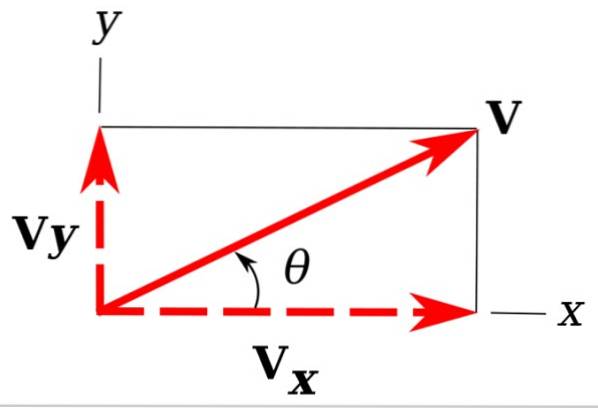
In the image we have our example vector back v, that is in the plane xy.
It is easy to see that the projections of v on the x and y coordinate axes determine a right triangle. These projections are vY Y vx and are called rectangular components of v.
One way to denote v through its rectangular components is like this: v =
If the vector is in three-dimensional space, one more component is needed, so that:
v =
Knowing the rectangular components, the magnitude of the vector is calculated, equivalent to finding the hypotenuse of the right triangle whose legs are vx Y vY,. By means of the Pythagorean theorem it follows that:
|v|two = (vx)two + (vY)two
When the magnitude of the vector is known |v| and the angle θ that this forms with the reference axis, generally the horizontal axis, the vector is also specified. The vector is then said to be expressed in polar form.
The rectangular components in this case are easily calculated:
vx = |v| .cos θ
vY = |v| .sen θ
According to the above, the rectangular components of the velocity vector v of the plane would be:
vx = 850. cos 45º km / h = 601.04 km / h
vY = 850. sin 45º km / h = 601.04 km / h
There are several types of vectors. There are vectors of velocity, position, displacement, force, electric field, momentum, and many more. As we have already said, in physics there are a large number of vector quantities.
As for vectors that have certain characteristics, we can mention the following types of vectors:
-Null: these are vectors whose magnitude is 0 and which are denoted as 0. Remember that the bold letter symbolizes the three fundamental characteristics of a vector, while the normal letter represents only the module.
For example, on a body in static equilibrium, the sum of forces must be a null vector.
-Free and bound: free vectors are those whose points of origin and arrival are any pair of points in the plane or space, unlike linked vectors, whose origin coincides with that of the reference system used to describe them.
The couple or moment produced by a couple of forces is a good example of a free vector, since the couple does not apply to any particular point.
-Teamlenses: they are two free vectors that share identical characteristics. Therefore they have equal magnitude, direction and sense.
-Coplanar or coplanar: vectors that belong to the same plane.
-Opposites: vectors with equal magnitude and direction, but opposite directions. The vector opposite a vector v is the vector -v and the sum of both is the null vector: v + (-v) = 0.
-Concurrent: vectors whose lines of action all pass through the same point.
-Sliders: are those vectors whose application point can slide along a particular line.
-Collinear: vectors that are located on the same line.
-Unitary: those vectors whose modulus is 1.
There is a very useful type of vector in physics called an orthogonal unit vector. The orthogonal unit vector has a module equal to 1 and the units can be any, for example those of speed, position, force or others.
There is a set of special vectors that help to easily represent other vectors and to perform operations with them: they are orthogonal unit vectors i, j Y k, unitary and perpendicular to each other.
In two dimensions, these vectors are directed along the positive direction of both the axis x as of the axis Y. And in three dimensions a unit vector is added in the direction of the axis z positive. They are represented as follows:
i = <1, 0,0>
j = < 0,1,0>
k = <0,0,1>
A vector can be represented by the unit vectors i, j Y k as follows:
v = vx i + vY j + vz k
For example the velocity vector v from the above examples can be written as:
v = 601.04 i + 601.04 j km / h
The component in k is not necessary, since this vector is in the plane.
The sum of vectors appears very frequently in various situations, for example when you want to find the resultant force on an object that is affected by various forces. To begin, suppose that we have two free vectors or Y v on the plane, as shown in the following figure on the left:
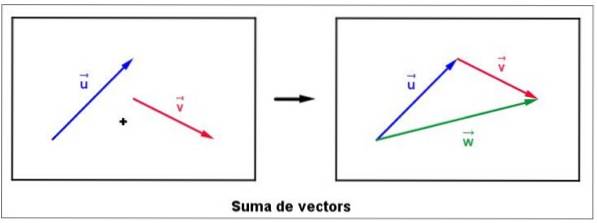
Immediately carefully moved to vector v, without modifying its magnitude, direction or sense, so that its origin coincides with the end of or.
The sum vector is called w and is drawn starting from u ending in v, according to the right figure. It is important to note that the magnitude of the vector w is not necessarily the sum of the magnitudes of v Y or.
If you think about it carefully, the only time that the magnitude of the resulting vector is the sum of the magnitudes of the addends, is when both addends are in the same direction and have the same sense..
And what happens if the vectors are not free? It is also very easy to add them. The way to do it is adding component to component, or analytical method.
As an example, let's consider the vectors in the following figure, the first thing is to express them in one of the Cartesian ways previously explained:
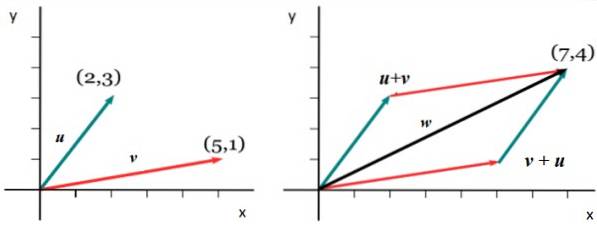
v = <5,1>
or = <2,3>
To get the component in x of the sum vector w, the respective components are added in x from v Y or: wx = 5 + 2 = 7. And to get wY an analogous procedure is followed: wY = 1 + 3. Therefore:
or = <7,4>
-The sum of two or more vectors results in another vector.
-It is commutative, the order of the addends does not alter the sum, in such a way that:
or + v = v + or
-The neutral element of the sum of vectors is the null vector: v + 0 = v
-The subtraction of two vectors is defined as the sum of the opposite: v - u = v + (-or)
As we have said, there are numerous vector quantities in physics. Among the best known are:
-Position
-Displacement
-Average speed and instantaneous speed
-Acceleration
-Force
-Amount of movement
-Torque or moment of a force
-Impulse
-electric field
-Magnetic field
-Magnetic moment
On the other hand, they are not vectors but scalars:
-Weather
-Mass
-Temperature
-Volume
-Density
-Mechanical work
-Energy
-Hot
-Power
-Voltage
-Electric current
In addition to the addition and subtraction of vectors, there are three other very important operations between vectors, because they give rise to new very important physical quantities:
-Product of a scalar and a vector.
-The dot product or dot product between vectors
-And the cross or vector product between two vectors.
Consider Newton's second law, which states that the force F and acceleration to they are proportional. The constant of proportionality is the mass m of the object, therefore:
F = m.to
Mass is a scalar; force and acceleration are vectors. Since the force is obtained by multiplying the mass by the acceleration, it is the result of the product of a scalar and a vector.
This type of product always results in a vector. Here's another example: the amount of movement. Be P the momentum vector, v the speed vector and as always, m is the mass:
P = m.v
We have placed mechanical work on the list of quantities that are not vectors. However, work in physics is the result of an operation between vectors called scalar product, inner product or dot product..
Let the vectors be v Y or, the dot product or scalar between them is defined as:
v∙or = |v| ∙ |or | .cos θ
Where θ is the angle between the two. From the equation shown it follows immediately that the result of the dot product is a scalar and also that if both vectors are perpendicular, their scalar product is 0.
Back to mechanical work W, this is the scalar product between the force vector F and the displacement vector ℓ.
W = F∙ℓ
When vectors are available in terms of their components, the dot product is also very easy to calculate. Yes v =
v∙or = vx orx + vY orY + vz orz
The dot product between vectors is commutative, therefore:
v∙or = or∙v
Yes v and u are our two example vectors, the vector product is defined as:
v x or = w
It immediately follows that the cross product results in a vector, whose modulus is defined as:
|v x u | = | v | . | u |. sen θ
Where θ is the angle between the vectors.
The cross product is not commutative, therefore v x u ≠ u x v. In fact v x u = - (u x v).
If the two example vectors are expressed in terms of the unit vectors, the calculation of the vector product is facilitated:
v = vx i + vY j + vz k
or = ux i + orY j + orz k
The cross product between identical unit vectors is zero, since the angle between them is 0º. But between different unit vectors, the angle between them is 90º and sin 90º = 1.
The following diagram helps to find these products. In the direction of the arrow it has a positive direction and in the opposite direction negative:
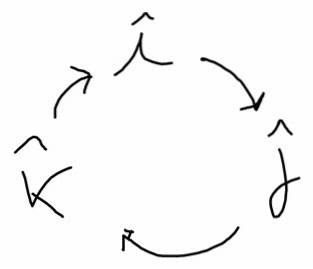
i x j = k, j x k = i; k x i = j; j x i = -k; k x j = -i; i x k = -j
Applying the distributive property, which is still valid for the products between vectors plus the properties of unit vectors, we have:
v x or = (vx i + vY j + vz k) x (ux i + orY j + orz k) =
= (vYorz - vzorY )i + (vzorx - vxorz )j + (vxorY - vYorx )k
Given the vectors:
v = -5 i + 4j + 1 k
or = 2 i -3 j + 7k
What should be the vector w so that the sum v + or + w it turns out 6 i +8 j -10k?
-5 i + 4j + 1 k
two i -3 j + 7k
wx i + wY j + wz k +
--
6i + 8 j -10 k
Therefore, it must be fulfilled that:
-5 +2 + wx = 6 → wx = 9
4-3 + wY = 8 → wY = 7
1 + 7 + wz = -10 → wz = -18
The answer is: w = 9 i +7 j - 18k
What is the angle between the vectors v Y or from exercise 1?
We will use the dot product. From the definition we have:
cos θ = v∙or / |v| ∙ |or|
v∙or= -10 -12 + 7 = -15
|v| = √ (-5)two +4two +1two= √42 = 6.48
|or| = √2two +(-3)two +7two= √62 = 7.87
Substituting these values:
cos θ = -15 / 6.48 x 7.87 = -0.2941 → θ = 107.1 º



Yet No Comments