
The moment of inertia of a rigid body with respect to a certain axis of rotation, represents its resistance to changing its angular velocity around said axis. It is proportional to the mass and also to the location of the axis of rotation, since the body, depending on its geometry, can rotate more easily around certain axes than in others.
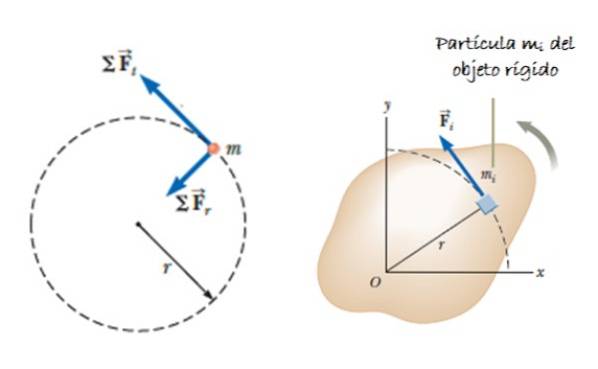
Suppose a large object (consisting of many particles) which can rotate around an axis. Suppose a force acts F, applied tangentially on the mass element Δmi, that produces a torque or moment, given by τnet = ∑ri x Fi. The vector ri is the position of Δmi (see figure 2).

This moment is perpendicular to the plane of rotation (direction +k = coming out of the paper). Since the force and the radial position vector are always perpendicular, the cross product remains:
τnet = ∑ Fi ri k = ∑ (Δmi toi) ri k = ∑ Δmi (toi ri ) k
Acceleration toi represents the tangential component of acceleration, since radial acceleration does not contribute to torque. As a function of the angular acceleration α, we can indicate that:
toi = α ri
Therefore the net torque looks like this:
τnet = ∑ Δmi (α ritwo) k = (∑ ritwo Δmi) α k
The angular acceleration α is the same for the whole object, therefore it is not affected by the subscript "i" and can leave the summation, which is precisely the moment of inertia of the object symbolized by the letter I:
I = ∑ ritwo Δmi
This is the moment of inertia of a discrete mass distribution. When the distribution is continuous, the summation is replaced with an integral and Δm becomes a mass differential dm. The integral is carried out over the entire object:
I = ∫M(rtwo) dm
The units of the moment of inertia in the SI International System are kg x mtwo. It is a scalar and positive quantity, since it is the product of a mass and the square of a distance.
Article index
An extended object, such as a bar, disk, sphere, or other, whose density ρ is constant and knowing that the density is the mass - volume ratio, the mass differential dm is written as:
ρ = dm / dV → dm = ρdV
Substituting in the integral for the moment of inertia, we have:
I = ∫rtwo ρdV = ρ ∫rtwodV
This is a general expression, valid for a three-dimensional object, whose volume V and position r are functions of the spatial coordinates x, Y Y z. Note that being constant, the density is outside the integral.
The density ρ It is also known as volumetric density, but if the object is very flat, like a sheet or very thin and narrow like a rod, other forms of density can be used, let's see:
- For a very thin sheet, the density to use is σ, the surface density (mass per unit area) and gives is the area differential.
- And if it is a thin bar, where only the length is relevant, the linear mass density is used λ and a length differential, according to the axis used as a reference.
In the examples that follow, all objects are considered to be rigid (not deformable) and have uniform density.
Here we are going to calculate the moment of inertia of a thin, rigid, homogeneous bar of length L and mass M, with respect to an axis that passes through the middle.
First, it is necessary to establish a coordinate system and build a figure with the appropriate geometry, like this:
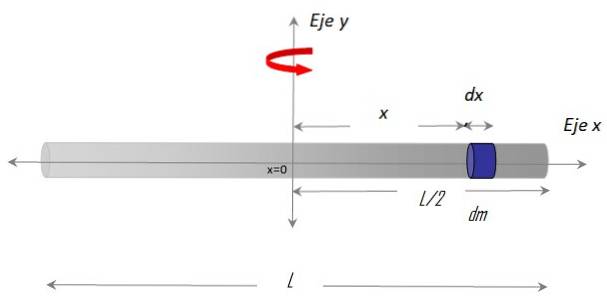
The X axis along the bar and the Axis y as the axis of rotation. The procedure for establishing the integral also requires choosing a differential of mass over the bar, called dm, which has a differential length dx and is located at the position x arbitrary, relative to the center x = 0.
According to the definition of linear mass density λ:
λ = M / L
Since the density is uniform, which is valid for M and L, it is also valid for dm and dx:
λ = dm / dx → dm = λdx.
On the other hand, the mass element is in the position x, then by substituting this geometry in the definition, we have a definite integral, whose limits are the ends of the bar according to the coordinate system:
Substituting the linear density λ = M / L:
To find the moment of inertia of the bar with respect to another axis of rotation, for example one that passes through one of its ends, you can use Steiner's theorem (see exercise solved at the end) or perform a direct calculation similar to the one shown here, but modifying the geometry appropriately.
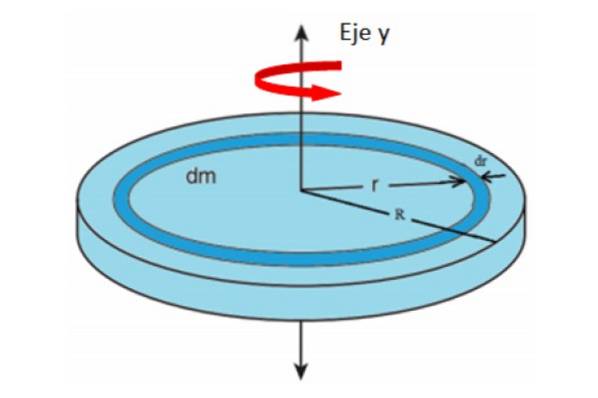
A very thin disk of negligible thickness is a flat figure. If the mass is uniformly distributed over the entire surface of area A, the mass density σ is:
σ = M / Y
So much dm What gives correspond to the mass and the area of the differential ring shown in the figure. We will assume that the whole assembly rotates around the y-axis.
You can imagine that the disk is composed of many concentric rings of radius r, each with its respective moment of inertia. Adding the contributions of all the rings until reaching the radius R, we will have the total moment of inertia of the disk.
σ = dm / dA → dm = σgives
Where M represents the entire mass of the disk. The area of a disk depends on its radius r as:
A = π.rtwo
Deriving with respect to r:
dA / dr = 2 = 2π.r → dA = 2π.rdr
Substituting the above in the definition of I:
Substituting σ = M / (π.Rtwo ) remains:
%5Cleft&space;(%5Cfrac%7BR%5E%7B4%7D%7D%7B4%7D&space;%5Cright&space;)=%5Cfrac%7B1%7D%7B2%7DMR%5E%7B2%7D)
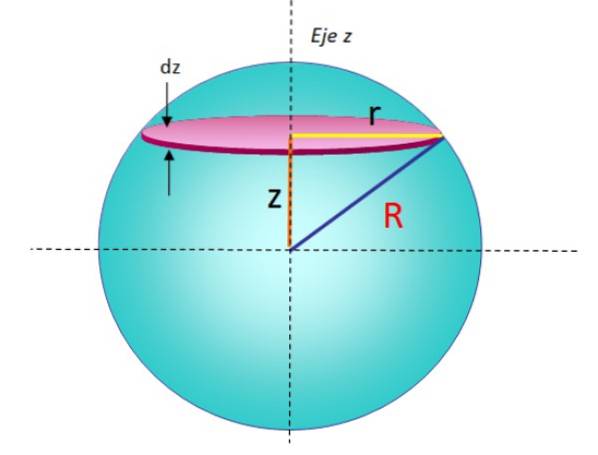
A sphere of radius R can be thought of as a series of disks stacked one on top of the other, where each disk of infinitesimal mass dm, radio r and thickness dz, has a moment of inertia given by:
gavedisk = (½) rtwodm
To find this differential, we simply took the formula from the previous section and substituted M Y R for dm Y r, respectively. A disk like this can be seen in the geometry of figure 5.
By adding all the infinitesimal moments of inertia of stacked disks, the total moment of inertia of the sphere is obtained:
Isphere = ∫dIdisk
Which is equivalent to:
I = ∫sphere (½) rtwodm
To solve the integral you need to express dm properly. As always, it is achieved from the density:
ρ = M / V = dm / dV → dm = ρ.dV
The volume of a differential disk is:
dV = Area of base x height
The height of the disc is the thickness dz, while the area of the base is πrtwo, Thus:
dV = πrtwodz
And substituting in the proposed integral it would look like this:
I = ∫sphere(½) rtwodm = ∫ (½) rtwo(ρπrtwodz)
But before integrating, it must be observed that r -the radius of the disk- depends on z and R -the radius of the sphere-, as can be seen from figure 5. Using the Pythagorean theorem:
Rtwo = rtwo + ztwo → rtwo = Rtwo - ztwo
Which leads us to:
I = ∫sphere(½) ρ rtwo(πrtwodz) = ∫sphere(½) ρ π r4dz= ∫sphere(½) ρ π (Rtwo - ztwo)two dz
To integrate over the entire sphere, we note that z varies between -R and R, therefore:
Knowing that ρ = M / V = M / [(4/3) πR3] finally it is obtained, after simplifying:
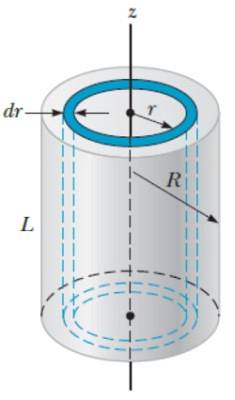
For this object a method similar to the one used for the sphere is used, only this time it is easier if the cylinder is imagined to be formed by cylindrical shells of radius r, thickness dr and height H, as if they were the layers of an onion.
The volume dV of a cylindrical layer is:
dV = 2π.rL.dr
Therefore the shell mass is:
dm = ρ.dV = ρ. 2π.r.L.dr
This expression is substituted in the definition of moment of inertia:
The above equation indicates that the moment of inertia of the cylinder does not depend on its length, but on its mass and radius only. Yes L changed, the moment of inertia with respect to the axial axis would remain the same. For this reason, I of the cylinder coincides with that of the previously calculated thin disk.
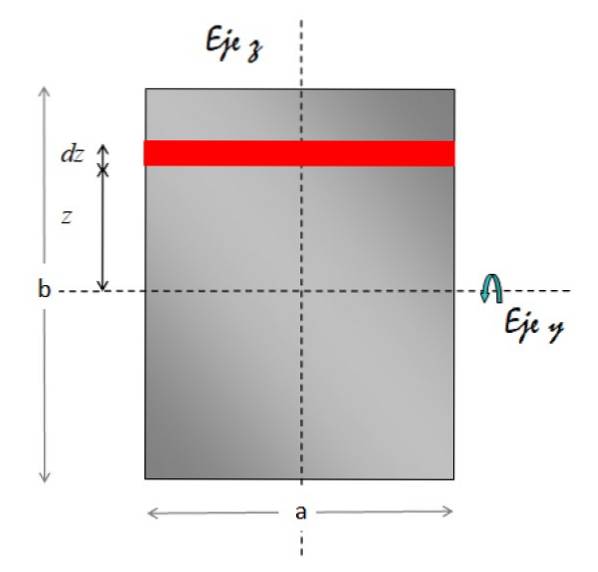
The Axis y horizontal axis of rotation. The figure below shows the geometry required to carry out the integration:
The area element marked in red is rectangular. Its area is base x height, therefore:
dA = a.dz
Therefore the mass differential is:
dm = σ.dA = σ. (a.dz)
Regarding the distance from the area element to the axis of rotation, it is always z. We substitute all this in the integral of the moment of inertia:
Now the surface mass density σ is replaced by:
σ = M / ab
And it definitely looks like this:
Note that it is like the one with the thin bar.
For a side square L, in the previous expression valid for a rectangle, simply substitute the value of b for that of L:
There are two especially useful theorems to simplify the calculation of moments of inertia about other axes, which could otherwise be difficult to find due to lack of symmetry. These theorems are:
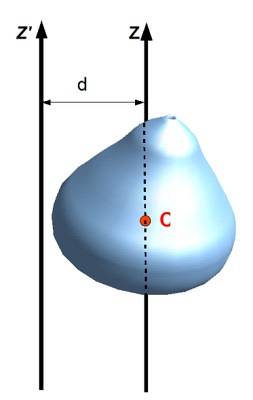
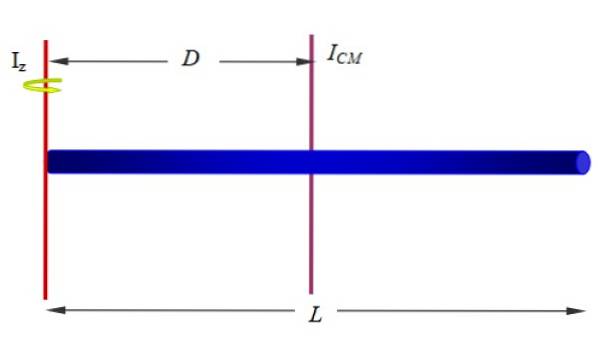
Also called parallel axes theorem, relates the moment of inertia with respect to an axis with another that passes through the center of mass of the object, as long as the axes are parallel. To apply it, it is necessary to know the distance D between both axes and of course the mass M of the object.
Be Iz the moment of inertia of an extended object with respect to the z axis, ICM the moment of inertia with respect to an axis that passes through the center of mass (CM) of said object, then it is true that:
Iz = ICM + MDtwo
Or in the notation of the following figure: Iz ' = Iz + Mdtwo
This theorem is applied to plane surfaces and goes like this: the moment of inertia of a plane object around an axis perpendicular to it is the sum of the moments of inertia around two axes perpendicular to the first axis:
Iz = Ix + IY
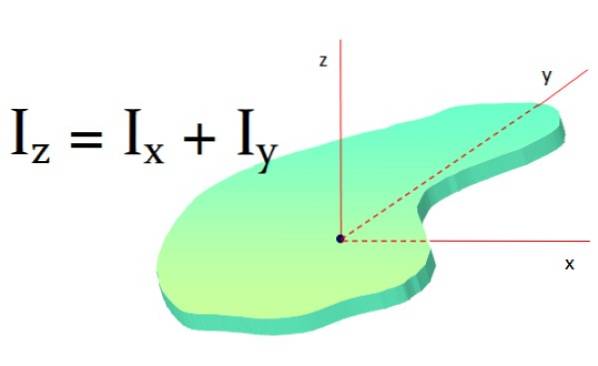
If the object has symmetry such that Ix and IY are equal, then it is true that:
Iz = 2Ix
Find the moment of inertia of the bar with respect to an axis that passes through one of its ends, as shown in figure 1 (below and to the right) and figure 10.
Solution:
We already have the moment of inertia of the bar around an axis that passes through its geometric center. Since the bar is homogeneous, its center of mass is at that point, so this will be our ICM to apply Steiner's theorem.
If the length of the bar is L, the z axis is at a distance D = L / 2, therefore:
Iz = ICM + MDtwo= (1/12) MLtwo+M (L / 2)two= (1/3) MLtwo



Yet No Comments